VisualMimic Team

*Equal contribution †Equal advising

*Equal contribution †Equal advising
We would like to thank all members of the CogAI group and The Movement Lab from Stanford University for their support. We also thank the Stanford Robotics Center for providing the experiment space. This work is in part supported by Stanford Institute for Human-Centered AI (HAI), Stanford Robotics Center (SRC), ONR MURI N00014-22-1-2740, ONR MURI N00014-24-1-2748, and NSF:FRR 215385.
@article{yin2025visualmimic,
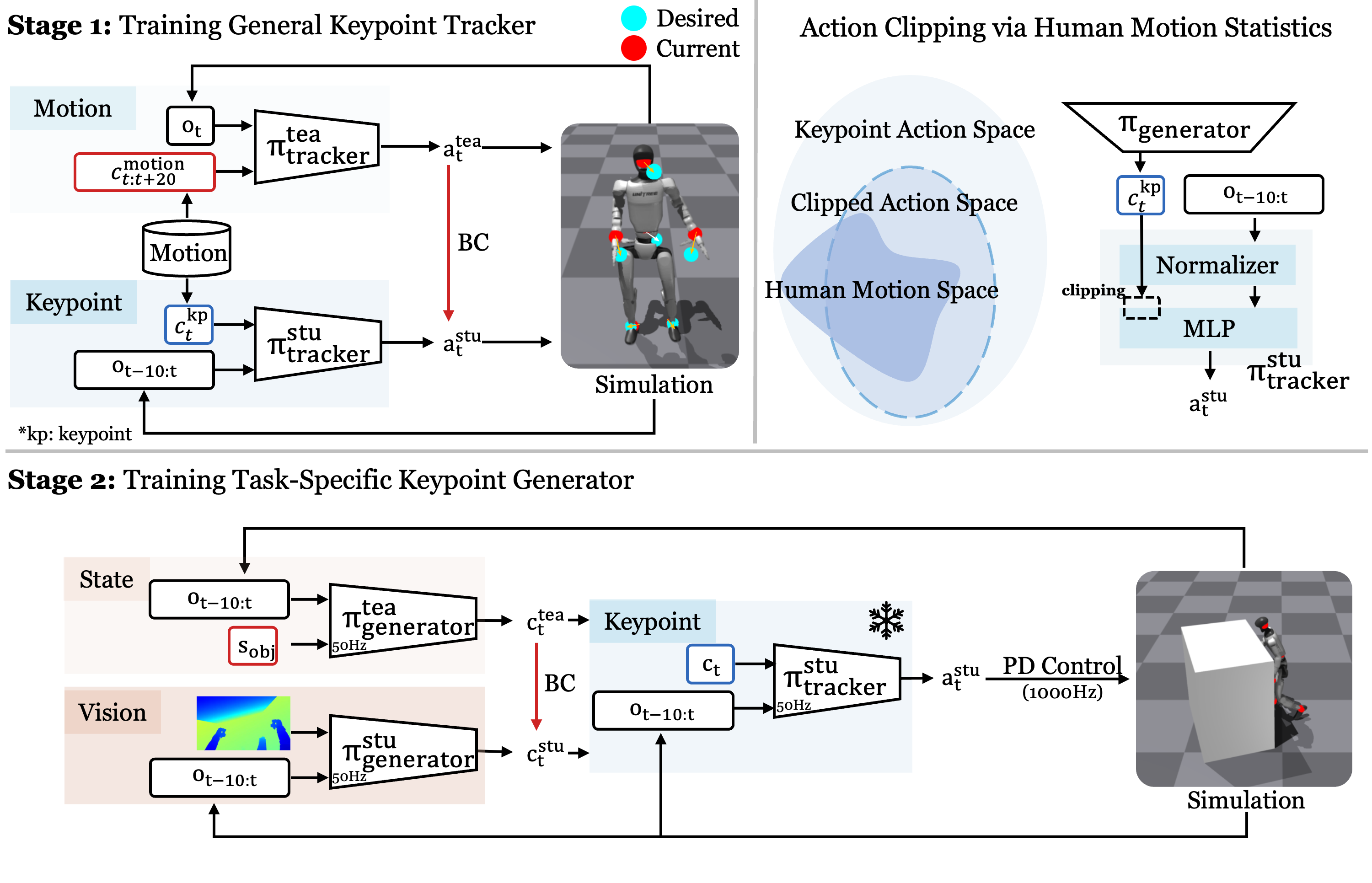
title={VisualMimic: Visual Humanoid Loco-Manipulation via Motion Tracking and Generation},
author= {Shaofeng Yin and Yanjie Ze and Hong-Xing Yu and C. Karen Liu and Jiajun Wu},
year= {2025},
journal= {arXiv preprint arXiv:2509.20322}
}